在场移动机械臂的竖向井干式木构容差自适应性连续建造
指导教师:毕康(日本北九州市立大学项目研究员、博士)助教:孙成鹏
技术支持:DAMlab x DAM-Robot x AIEstudio
关键词:木结构建筑;自动化现场施工;移动施工平台;基准标记系统;实时控制
工作营简介:
数字化建造技术的发展正逐渐由传统几何精度控制转向更加关注材料本身的物理特性与实际状态。针对木材在加工、干燥和搬运过程中的尺寸波动及几何误差,本工作营将探讨一种基于实时材料感知的竖向井干式木结构自动化建造方法。通过部署机器视觉系统,每个构件的厚度偏差及几何变化在建造过程中实时扫描并反馈至数字化建造算法,机械臂能够实时动态调整施工策略,以材料的真实情况为依据,取代传统的预设尺寸模型。
在具体建造实践中,木材厚度的差异和局部几何误差不再被视为问题,而成为设计与施工的重要依据。通过特定算法实现厚薄木材的有序排布,形成结构稳定的曲面形态,并利用木材自然弯曲的特性构建出相互咬合的稳定结构。这种设计方法显著提升了材料的利用率,也有效地解决了传统标准化构件因尺寸波动造成的施工难题。
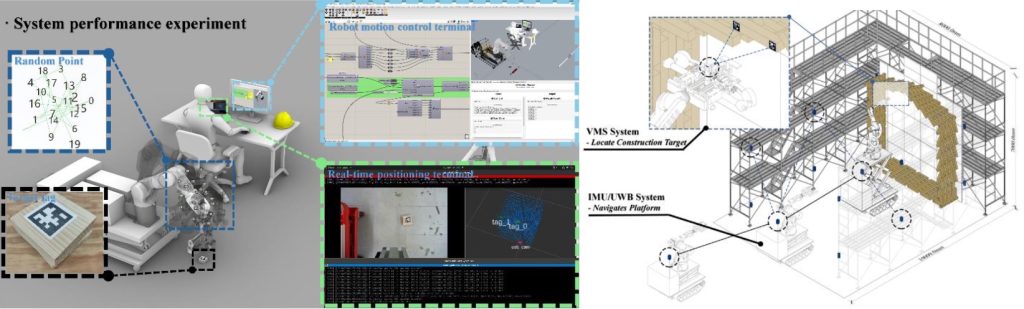
技术层面上,竖向井干式木构自动化建造整合可移动施工平台(MCP)、fiducial markers system(FMS)以及UWB/IMU定位技术,确保自动化建造过程的精度与鲁棒性。此外,机械臂末端执行器内置的实时感知与反馈系统能及时校正拼接过程中产生的误差,达到毫米级的精准叠合与装配。基于传统木结构施工经验的系统化分析,参与者将与我们共同探究适用于竖向井干木构体系的可编程装配逻辑。
整体而言,本次工作营将突破传统数字建造中材料需严格符合设计的局限,提出了一种反向定义的建造逻辑,即材料实际误差与特性驱动设计与施工过程。这种方法为未来复杂木结构的自动化建造提供了具有实用性和创新性的策略参考。
这个工作坊欢迎任何人 —— 设计师、工程师、艺术家或者热衷于塑造木构建筑新未来的爱好者
技能要求:熟练使用 Rhino, Grasshopper, PS
软件要求 :Rhinoceros 7 SR30
硬件要求:笔记本电脑
最大参与人数 :16
导师团队:

毕康
北九州市立大学 国际环境工学院 工学博士,机械自动化与建筑学双背景 。
研究领域为自动化建造、增材制造以及机器人技术。
助教 :

孙成鹏
北九州市立大学研究生,研究方向为复杂井干式木构在场自动化机械臂建造,发表国际会议论文两篇,拥有丰富的数字建造经验。
日程安排:
1.Day1(9.12): 8:00-17:00工作营内容介绍,材料与工艺概览
2.Day2(9.13): 9:00-17:00 曲面形体设计与优化
3.Day3(9.14): 9:00-17:00 曲面形体设计与优化
4.Day4(9.15): 9:00-17:00 学习机械臂操作
5.Day5(9.16): 9:00-17:00 机械臂在场连续建造
6.Day6(9.17): 9:00-17:00 机械臂在场连续建造
7.Day7(9.18): 9:00-17:00 机械臂在场连续建造
8.Day8(9.19): 9:00-17:00 2025滨海人居环境学术创新中心国际会议主题讲座
9.Day9(9.20): 9:00-17:00 工作营闭幕式