Vertical Timber Construction with Tolerance-Adaptive Continuity Using On-Site Mobile Robotic Arms
Instructor: Kang Bi (Project Researcher, University of Kitakyushu, Japan; PhD)
Teaching Assistant: Chengpeng Sun
Technical Support: DAMlab × DAM-Robot × AIEstudio
Keywords: timber building; automated on-site construction; mobile construction plat- form; fiducial marker system; real-time control
Description:
With the advancement of digital construction technologies, the focus has gradually shifted from purely geometric precision to the physical properties and real-time conditions of materials. In response to dimensional variations and geometric deviations in timber caused during processing, drying, and handling, this workshop explores an adaptive construction method for vertical interlocking timber structures, driven by real-time material sensing. Through the deployment of a machine vision system, each timber element is scanned during construction to detect thickness variations and geometric irregularities, which are then fed back to a digital construction algorithm. The robotic arm dynamically adjusts the construction strategy in real time, basing its actions on actual material conditions rather than preset models.
In this construction practice, variations in timber thickness and local geometry are no longer considered problems but instead serve as critical input for both design and execution. Specific algorithms allow for the orderly arrangement of thick and thin elements to form structurally stable curved surfaces. Leveraging the natural bending properties of timber, participants will construct interlocking structures with enhanced stability. This design strategy significantly improves material utilization and effectively addresses construction challenges posed by dimensional inconsistencies in standardized components.
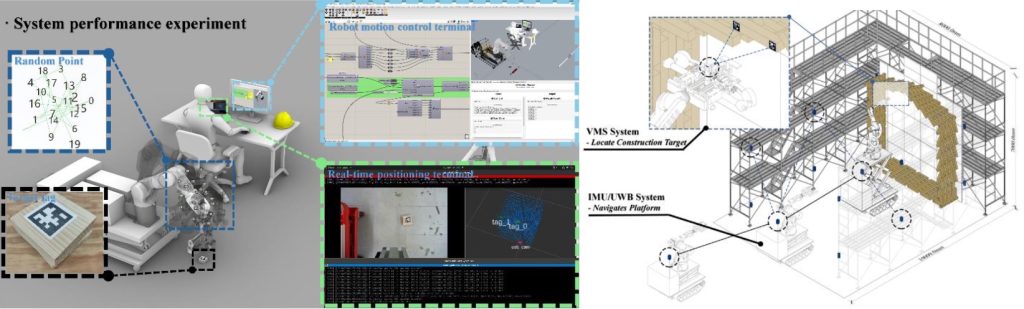
Technically, the automated construction of vertical interlocking timber structures integrates a Mobile Construction Platform (MCP), a Fiducial Marker System (FMS), and UWB/IMU positioning technologies to ensure precision and robustness throughout the automated process. In addition, the robotic end-effector is equipped with a real-time sensing and feedback system capable of correcting errors during assembly, achieving millimeter-level precision in stacking and fitting. Participants will engage in a systematic analysis based on traditional timber construction experience to develop programmable assembly logic tailored to vertical interlocking timber systems.
Overall, this workshop challenges the conventional notion in digital construction that materials must strictly conform to design specifications. Instead, it introduces a reverse-defined construction logic—where actual material deviations and characteristics drive both design and execution. This approach offers practical and innovative strategies for the future of complex timber construction automation.
This workshop welcomes participants of all backgrounds—designers, engineers, artists, or enthusiasts passionate about shaping the future of timber architecture.
Required Skills : Proficiency in Rhino, Grasshopper, Photoshop
Required Software: Rhinoceros 7 SR30
Required Hardware: Laptop
Maximum Participants: 16
Instructor:

Kang Bi
Ph.D. in Engineering from the Graduate School of Environmental Engineering, the University of Kitakyushu.
Dual academic background in mechanical automation and architecture.
Research interests include automated construction, additive manufacturing, and robotic technologies.
Teaching Assistant :

Chengpeng Sun
Graduate student at the University of Kitakyushu.
Research: on-site automated robotic construction of complex log-stacked timber structures.
Has published two international conference papers and possesses extensive experience in digital fabrication.
Workshop Schedule:
1.Day1(9.12): 8:00-17:00 Workshop overview, materials and equipment briefing
2.Day2(9.13): 9:00-17:00 Surface Form Design & Optimization
3.Day3(9.14): 9:00-17:00 Surface Form Design & Optimization
4.Day4(9.15): 9:00-17:00 Robotic Arm Operation Training
5.Day5(9.16): 9:00-17:00 On-Site Continuous Construction with Robotic Arm
6.Day6(9.17): 9:00-17:00 On-Site Continuous Construction with Robotic Arm
7.Day7(9.18): 9:00-17:00 On-Site Continuous Construction with Robotic Arm
8.Day8(9.19): 9:00-17:00 iSMART 2025 International Conference Keynote Lectures
9.Day9(9.20): 9:00-17:00 Final presentations, workshop closing ceremony & exhibition launch