Synergy Force Dome: Performance-Driven Design and Construction of Lightweight Vaults Using Robotic Spatial FDM with Recyclable Polymers
Instructor: Haining Zhou (PhD, the University of Kitakyushu; MArch, IAAC – Institute for Advanced Architecture of Catalonia)
Teaching Assistants: Zhuang Zhuo, Yifan Yin
Technical Support: DAMlab × DAM-Robot
Keywords:Light-Weight Vault Structure; Performance-Driven Design; Robotic Fabrication; Stress-Responsive Mesh Subdivision, Form Sensitive Panel Optimization, Spatial FDM Printing; Formwork-Free Construction
Description:
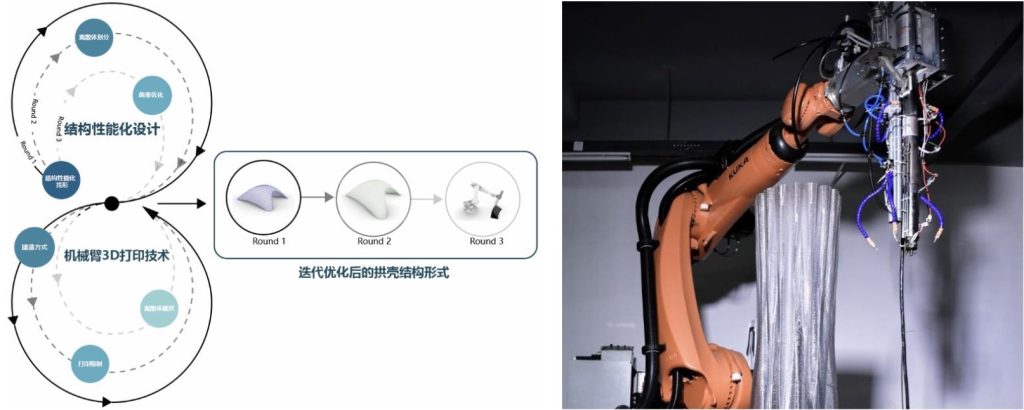
At the intersection of digital technology and traditional construction wisdom, architectural design and construction techniques are advancing toward greater precision, efficiency, and environmental consciousness, enhancing the integration between design, performance, and fabrication. This transformation enables multi-dimensional optimization of high-performance design across environmental, material, macro, and micro levels. This workshop explores how performance-oriented design methodologies can be combined with parametric and optimization tools to develop dome structures using robotic spatial FDM printing techniques.
Participants will systematically learn the fabrication logic of spatial FDM printing, gaining insights into the core processes and critical factors that affect form design and print quality. The workshop will delve into how structural performance influences dome shape and construction optimization. Using Grasshopper as a visual programming platform, participants will engage in designing dome forms and performance-driven textures based on real-world construction scenarios. They will optimize mesh geometry and panelization strategies considering curvature and structural performance, adjusting layout within fabrication constraints. With simulation software, participants will validate their designs, and conduct robotic printing and assembly tests to understand how material behavior changes under different temperature conditions during fabrication. Ultimately, participants will use robotic arms to construct and assemble a full-scale prototype of their parametric design on-site.
This workshop aims to explore the revolutionary potential of robotic spatial FDM printing in architectural construction. Through a contemporary reinterpretation of the classical dome, it establishes a fully digitized workflow from conceptual design to physical realization. By utilizing the spatial flexibility of robotic arms, the workshop seeks to transcend the limits of traditional layer-by-layer printing, achieving a harmonious balance between formal freedom, performance optimization, and construction intelligence. Parametric platforms will empower structure, material, and fabrication logic to act as intrinsic drivers of form generation, establishing a closed-loop system from simulation to physical validation, and ultimately creating architectural forms that are both structurally rational and spatially poetic.
Required Skills: Rhino, Grasshopper, basic Python programming, fundamentals of structural mechanics
Required Software: Rhinoceros 7, Grasshopper
Required Hardware: Laptop
Maximum Participants: 12
Instructor:

Haining Zhou
Ph.D. in Robotics and Architecture, the University of Kitakyushu
M.Arch, Institute for Advanced Architecture of Catalonia (IAAC), Spain
Dr. Zhou specializes in architectural robotics, with research interests spanning robotic 3D printing, structural performance optimization, and material sustainability. He previously served as an academic assistant at IAAC and worked at LCD Design Lab in Beijing. Since 2014, he has been using Grasshopper for design and research, and has been involved in robotic fabrication since 2016. Dr. Zhou brings extensive hands-on and teaching experience in computational design and robotic construction.
Workshop Schedule:
1.Day1(9.12): 8:00-17:00 Workshop overview, materials and equipment briefing
2.Day2(9.13): 9:00-17:00 Structural logic and form generation in design
3.Day3(9.14): 9:00-17:00 Mesh refinement and shell curvature optimization
4.Day4(9.15): 9:00-17:00 Morphological adjustments based on robotic fabrication constraints
5.Day5(9.16): 9:00-17:00 Full-scale construction
6.Day6(9.17): 9:00-17:00 Full-scale construction
7.Day7(9.18): 9:00-17:00 On-site assembly and structural testing
8.Day8(9.19): 9:00-17:00 iSMART 2025 International Conference Keynote Lectures
9.Day9(9.20): 9:00-17:00 Final presentations, workshop closing ceremony & exhibition launch